B.1 渦とは
渦とは何かという議論はアカデミックの分野でも完全に決着がついていない, という認識を僕は持っている. ただし今現在共通している認識は, 渦度は渦の物理的な形(トポロジー)を表現するには不適切であること, そして座標系の取り方によって値が変化しない数学的な表現が好まれるという点である. その他にも実験系であればsingal-to-noise ratioが大きい渦の決め方が望ましいという話もあるが, 一般的に普及している渦の特定方法は上記の2点をベース」に構築されているものである. 有名なものであるとQ値やLambda2があり, いずれも乱流の分野やレースカーの渦のトポロジーを議論する際によく使用されるツールである.
個人的にレースカーの設計において知っておくべきは, 平均化した流れ場での渦の挙動, 流れの制御デバイスとしての渦の使い方, 及びRANSでは捉えきれない渦の揺らぎが発生する条件などであると思っている. なので本稿はアカデミックな議論, 例えば渦内でのエネルギーカスケードなどに注目するのではなく, よりマクロな観点でざっくりとした渦の物理を扱っていく. またレースカーでの使用を前提とする以上必要不可欠となる, 渦の地面効果や境界層との干渉などのトピックも紹介する.
B.2 直接的に渦をダウンフォースにする方法
レースカーにおける渦の使用方法は大きく分けて2つ, 渦をダウンフォースを発生させるデバイスとして活用する方法と渦によって生じる流れ場を用いた流れ場の制御がある. 本章では渦内の圧力分布に基づいた渦そのものをダウンフォースを発生させるデバイスとして使用する方法, そして強力な渦を発生させるために必要な環境, 渦の強さの限界に焦点をあてて, 議論を進めていく.
B.2.1 渦の圧力分布
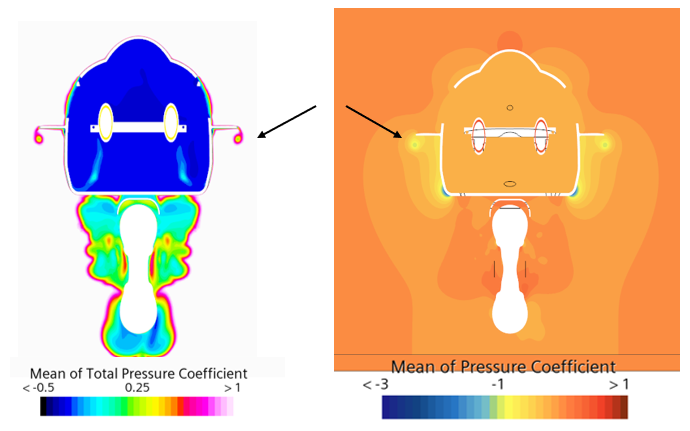
一般的な流体力学の教科書では渦度を定義した後に, ポテンシャル流れ, つまり非圧縮かつ非粘性流体においていくつかの流れ場を紹介することが多い. ポテンシャル流れの場合, 解の重ね合わせが可能であるため, その特性を生かして湧き出しや吸い込み, 二重湧き出しなどを用いて様々な流れ場を人為的に定義し, その流れ場を解析することができるが, 粘性の影響が出る境界層付近の流れや剥離を伴う流れに関しては解析ができない. 渦も同様で, 渦なし流れで回転を伴う流れは表現できるが, その中心は特異点となってしまい, 実際の物理とは異なった結果が出てくる. この問題はランキン渦モデルをはじめとした簡易的な二次元の渦を示す数学的なモデルが導入することで解決でき, それらのモデルを解析することによって渦の内部の圧力分布をより正確に推定することができるようになる. ここで注意するべきなのは, レースカーで渦を扱う場合, 紙面垂直方向の速度成分が紙面上の速度成分よりも大きいため, 渦を3次元として捉える必要があるという点である. 簡易的で有効なモデルを見つけることができなかったので数学的な説明は省略するが, 結論として渦は中心に近づくにつれて伸縮し, 渦の中心が最も低圧となる. この低圧の程度は渦の強さと比例するため, より強い渦を発生させるほど, その中心部部分の圧力は低くなり, 結果としてその上面に位置する面の圧力が低くなり, ダウンフォースを発生させる. 渦が持つ低圧領域の例として, 以下に自身の卒業課題で用いたウィングを付けたモーターバイクから生じる翼端渦のCpとCpTを掲載する. Cpのコンター図より, 渦の中心が周囲と比較して低圧になっている様子が分かる.
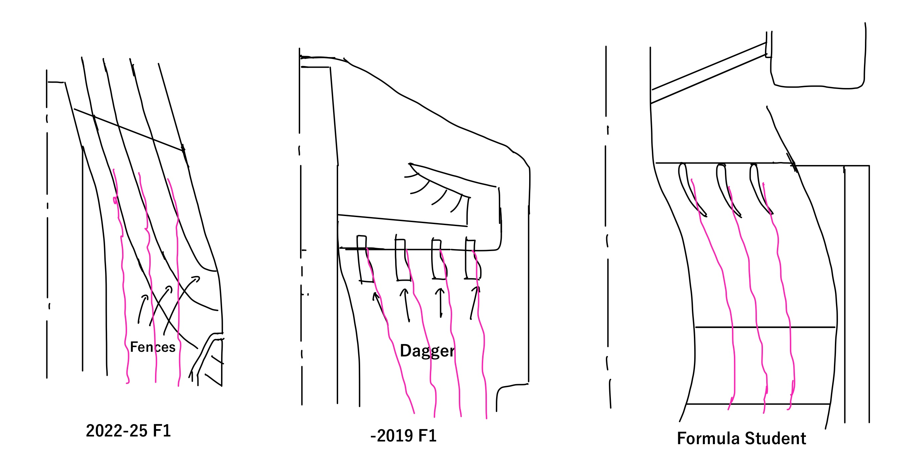
F1のフロア前方でのダウンフォースを発生させる手法としてもこの原理が用いられている. 2021年以前のフラットフロアではY250ボルテックスとバージボード, またフロア前縁のボルテックスジェネレータ(このデバイスはdaggerやclawと呼ばれる)を用いて, 2022年以降の3D形状のフロアであればフロアフェンスとフロアの形状をコントロールして渦の強さと数, そしてトポロジーをコントロールして, 前方のダウンフォースを発生させている. 学生フォーミュラでも近年特にヨーロッパのチームを中心に, 渦を用いてサイドウィングのパフォーマンスを向上させる狙いで大小さまざまのボルテックスジェネレータを使用しているチームがみられる. 以下にそれぞれの形状のスケッチと, ピンクの線で大まかな渦の様子を記した. なおピンクの線はあくまで渦の挙動を大まかに理解するための補助として書き込んだだけで, 実際にこのような渦の軌道をしているわけではない.
B.2.2 渦の生成方法
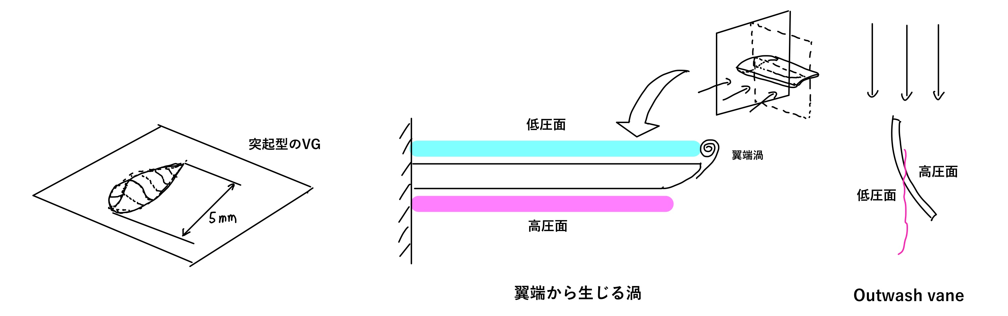
よくボルテックスジェネレータというと小さい突起状のデバイスを意味することがあるが, 渦を発生させるために必要な条件とは何か. これは翼端渦の発生の原理をもとに考えると分かりやすい. 渦が生じるのは1点, もしくは流れ方向の線上に強いせん断流れが発生したときであり, 翼端では上側と下側の圧力差によって翼の物理的な面がなくなるタイミングでせん断流れが生じる. このせん断流れはスライスで見ると点で生じるため, 後流に行くにつれてこのせん断流れは渦となる. つまり渦を物理的に必要な条件は, 局所的なせん断流れを発生させることであり, これには圧力差をもった面を作ることで, 面の縁から渦を発生させることができる.
この現象をより分かりやすく形状として落とし込んでみる. 圧力差が発生しているということは上面と下面, もしくは右面と左面で流れ場が異なるということを意味するので, 流れを曲げようとするような板や翼が必要だと分かる. 2022年以降のフェンス形状を見ると明らかなように, 前方からの流れを, より外向きの流れ, Outwashに変換するようにフェンスを配置することで, 外側は高圧, 内側には低圧な状況を作り出し, その圧力差でフェンスの下の縁より生じる渦でダウンフォースが強化されている. 渦の向きは高圧から低圧に向けて巻くため, この原理を理解していると, 自分の欲しい向きに渦を発生させたい場合, どっち向きに板, 及び翼を付けるべきかが明らかになる.
B.2.3 周囲のCpTによる渦への影響
これまでの議論は, 綺麗な流れ場における渦の話をしてきたが, レースカーで渦を発生させる場合, 必ずしもきれいな流れ場のもとで渦を作れるとは限らない. よってここでは周囲の環境が及ぼす渦への影響を紹介する.
まず焦点を当てたいのは, 周囲の流れ場の綺麗さだ. CFDで綺麗さを最も適切に表現できる変数は全圧力係数, CpTであり, 今後はCpTが高い, 低いという表現をそれぞれ流れ場が綺麗, 乱れているという表現に用いる. なおここでの流れ場は時間平均された流れ場の話であり, アカデミック的な乱流とは少し異なることに注意されたい. 流れ場の綺麗さとは簡単に言うと, どれだけ主成分以外の流れの要素が含まれているかということである. 流れ場の1つのスライスをとってLICなどを用いて流線を描いたとしよう. CpTが高い領域ほど, 実際の流れ場をその流線通りの挙動をしており, 実際にボルテックスジェネレータを配置したときに意図した通りの挙動をしやすい. 逆にCpTが低い領域では, 実際の流れ場が平均的な流れ場とそろっておらず, 流れが乱れているため, ボルテックスジェネレータから生じる渦はより弱くなる. 具体的な数値のめあすとしては, 渦を使いたい領域のCpTは少なくとも0.5以上は確保しておきたい. 経験上, 0.5を下回ると発生する渦の弱さは顕著となり, あまり低圧を発生させるという意味での効果は期待できなくなる.
以上の議論を要約すると, 渦を発生させるとき, その周囲のCpTはできるだけ高い状態を維持しておく必要がある. よって学生フォーミュラで彩度ウィングのダウンフォース強化を目的にボルテックスジェネレータを導入する場合, ボルテックスジェネレータを配置する位置のCpTをできるだけ高く維持できるような上流の制御, つまりフロントウィングの設計とサスペンションのジオメトリを実現する必要がある.
B.2.3 周囲の圧力勾配による渦への影響
実際のレースカーの流れ場においては常に渦が発生する長手方向にも圧力勾配が存在する. これは渦を発生させる縁の圧力差とは別で, 渦を発生させる縁に沿った圧力分布のことである. この圧力勾配は翼面の流れ場と同様に渦の挙動に大きな影響を与える.
渦の強さは周囲の圧力に影響され, 高圧から低圧になる圧力勾配下では渦をきれいな状態を保ったまま, より強くすることができる. 逆圧力勾配下ではその逆の現象が起こり, 渦の強さを増すことは困難になり, また渦そのものも汚い状態となる. 渦のロスに関する議論は次節に記載する.
現実的にはどんなウィングもCp=0の状態より低圧(つまり負の値を持つCp)を作り, やがてCp=0に戻っていく. よってダウンフォースを発生させているサイドウィングであれば, 必ず正圧力勾配と逆圧力勾配が存在する. よってできるだけ渦の発生させる領域を前方の正圧力勾配下で行うことで, 渦をきれいな状態で強くし, 結果としてその中心での低圧を高めることができる.
B.2.4 渦の限界と渦によるロス
以上の議論をまとめると, ダウンフォースを発生させるためにはより強い渦を発生させるといい, 渦を発生させるには圧力差が必要, そして周囲の圧力勾配が高圧から低圧になっていると, より渦の生成には有利であるということが分かる. それでは渦の強さに限界はあるのかという議論を本節では扱う.
渦を生成するときには, できるだけ緩やかに渦を強くしていくと良い. つまり正圧力勾配はできるだけ緩やかな方がよく, そして縁での圧力差は小さく, そして渦を発生させる縁が長いほどよい. 先述した通り, 渦の起点はせん断流れである. せん断流れが生じるということは, それによりエネルギーのカスケードが発生するため, 速度差はマクロな渦の中でせん断によって生じる細かい渦となり, そのエネルギーは熱として散逸していく. RANSではこのエネルギーカスケードは完全には再現されないものの, せん断によってロスが発生するというところは再現されており, 速度差がある領域, 例えば剥離領域や境界層ではCpTの低下が確認できる. これは渦でも同様で, 渦内のCpTは周りと比較すると少し低くなる. ここでできるだけ渦のCpTを高く維持したまま, 渦を強めたいと思うと, 渦を物理的に大きく, そしてできるだけ渦中心から外側に向けた速度分布を緩やかにしてせん断流れによるCpTのロスを抑えるのがベストという結論にたどり着ける. よって先述した通り, 縁での圧力差は小さく(渦に与えるせん断の影響をあまり大きくせず), 長い距離を掛けて渦を発生させる(渦領域を大きくすることで速度勾配をゆるやかにする)のが最も理想的な渦の作り方といえる.
渦はせん断流れを起点とするため, 逆に物理的な圧力差が提供されなくなると渦の強さはどんどん弱くなっていく. よって渦を強くする限界の1つは物理的な縁の長さとなる. 渦を強くしたければ圧力差を大きくするという方法もあるが, これはCpTとのトレードになる. CpTが低くなるにつれて渦を生成しずらくなるので, 結果としてこれは物理的な長さが取れない時にやむを得なく取る手段となる. 圧力差を抑えていてもいつかはCpTの予算に限界が来るので, これも1つの限界と言える. 逆圧力勾配のもとではこのCpTの低下が顕著に進み, いずれはBreakdownと呼ばれる渦の発散(バーストともいう)が起こる. 渦が発散するとその渦の回転は弱くなり, 結果として低圧も発生しない, ただのロスとなるため, 渦のBreakdownも渦の強さの限界を定義している. 縁での圧力差を大きくし過ぎた場合にも, Breakdownは発生するので, 圧力差を大きくすることでCpTが低下するの最終系がBreakdownという解釈をしても問題ない.
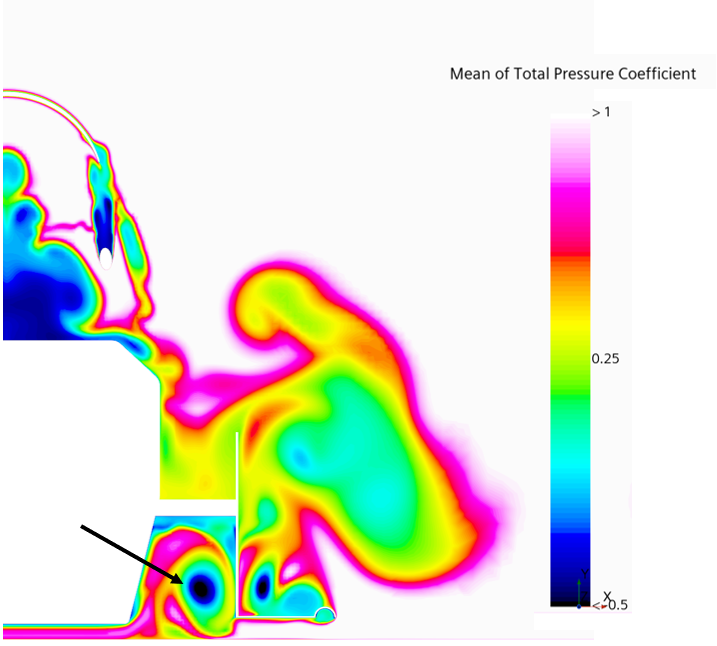
以下に学生フォーミュラのサイドウィングの前方からの渦が, 逆圧力勾配下でBreakdownを起こしている様子を記す. この渦は比較的うまくマネジメントされている方で, 内側に高CpTのupwashが見られるように, この状態でもある程度生きているが, その中心部のCpTは周りと比較して非常に低下している様子が分かる.
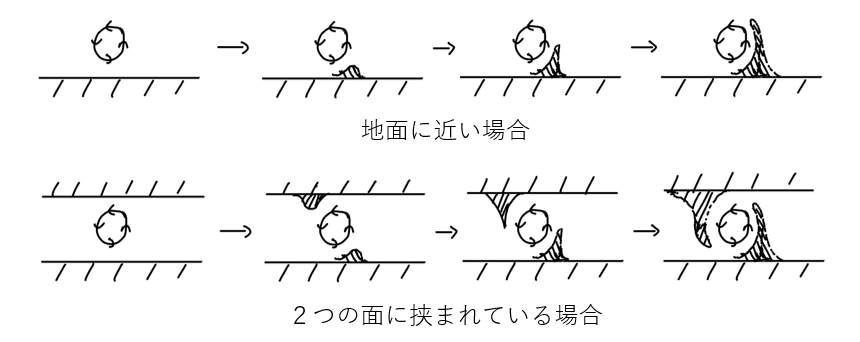
渦によるロスは紹介した渦そのものによる渦の他にも, 周囲にある壁の境界層との相互作用によるロスも存在する. 渦の低圧をより効果的にダウンフォースに変換するためには, 渦の中心と底面の距離をできるだけ近くしたいが, 渦によって発生する速度場によって上面の境界層による運動量損失領域が広がってしまうという問題がある. これにより渦の勢い(強さ)も低下してしまうのでできるだけ避けたい現象ではあるが, 実際にはある程度面に渦を近づける必要もあるので, ここはトレードオフの関係になる.
B.2.5 複数渦を用いたダウンフォース発生
本章の締めとして, 少し応用的な, 複数渦を用いたダウンフォースを発生させる方法を紹介する. これまでの渦の議論は基本的に1つの渦に着目して行われていたが, 複数の渦を用いることで渦単体より大きな効果を得ることができる.
例えば渦を強くしていくとバーストしてしまい, 単体の渦としてはバーストする直前がその状況で作り出すことのできる最高の強さの渦だという話を紹介したが, ボルテックスジェネレータを複数並べて配置することで, 渦の強さを分散し, より大きく強い渦のシステムを構成することができる. F1でも基本的にこの手法が用いられており, 2022年以降のF1のフロアには4つのボルテックスジェネレータ(フェンス)がついており, それ以前の規定ではより多くの小さなボルテックスジェネレータが使用されている. なお1つの強い渦を複数の渦に敢えて分散させることでBreakdownを避けるという手法はよく用いられており, これは英語ではVortex descretisationと呼ばれる.
以上のように基本的には渦を複数にすることで, 全体のシステムとしてより強力な渦を発生させることができるため, 単体の渦より強力なダウンフォースを発生させることができる. ただし複数渦のシステムを上手く活用するにあたっては, 注意すべきこともある. 個人的に最も大事だと思うのは個々の渦が合体するタイミングを上手く調節することだ. 複数の渦は互いに低圧領域を発生するため, 引き合う傾向にある. そのため, はじめは複数の渦で構成されていたはずのシステムもやがては互いに合体していき最終的には1つの渦になる. 以下の図に2つの渦が1つの渦に合体する過程を, 2つの渦の強さが同じときと違う時を例として記す.
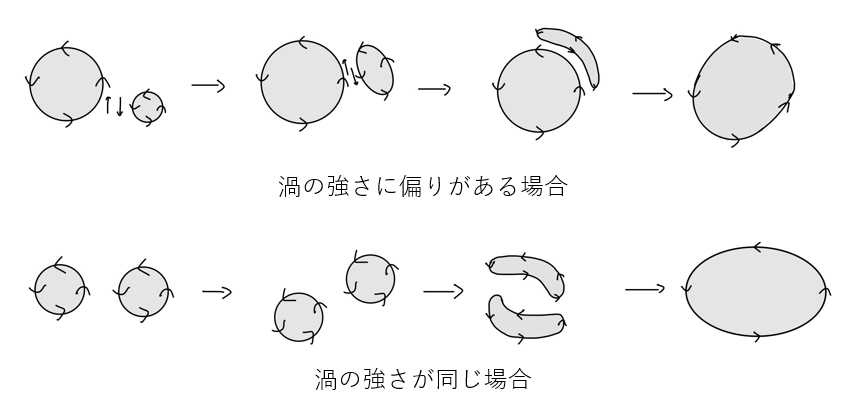
個々の渦が隣接しているとき, その回転は互いの回転を打ち消す方向に作用するため, 渦同士が合体するタイミングで, 全体のシステムとしての強度は減少し, それとともにより多くのCpT低下が発生する. これにより, 渦がより早いタイミングで弱まり, ダウンフォースの発生に貢献しなくなるため, できるだけ渦同士の合体は遅らせた方がいい. 2つ以上の渦の場合は, この合体を完全に防ぐことが不可能なことが多いが, それでも合体を例えば複数の段階に分けて, 後ろ側により多くの渦構造を送ることを意識して渦のシステムを設計すると, 結果として最も効果的に渦をダウンフォースとして利用することができる.
導入で応用的と紹介した理由の1つとして設計する際の個々の渦のコントロールが挙げられるが, それ以上に複数渦のシステムがRANSの相性の悪さがある. RANSは単純な渦の挙動を予測するには十分だが, Breakdownの具体的なタイミングや複数渦の合体の挙動を正確に予測するにはその精度は不十分だ. なので最終的にこれらの設計を正当化するには風洞試験を実施して, ダウンフォースや圧力センサのデルタを測定しRANSで実現できていた流れ場が実際に現実でも起こっているかを確認する必要がある. 僕の経験ではここの相関関係は非常によくないので, 学生フォーミュラでこのシステムを設計する際にはその点を注意する必要がある. なお非定常のDESなどを用いると渦の挙動予測は少し正確になる傾向はあるが, その一方でRANSより現実に近いとは限らないので, その点も注意が必要だ.
B.3 間接的に渦をダウンフォースにする方法(気流制御)
渦はダウンフォースを発生させるデバイスとして使用するほかにも, 周囲のロスの場所をコントロールする道具としても使用されることが多い. 実はoutwashやinwashを発生させているデバイスの多くがデバイスそのものの面によって生じるoutwashやinwashよりも, 渦によって得られる気流制御を目的として使用される方が多いほど, 渦による気流制御の幅は大きい. 本章では渦を用いた局所的な気流制御について紹介する.
B.3.1 渦が与える周囲への影響
フォーミュラカーではフロアに入っていく渦以外にも, より多くの渦を用いて, 特にタイヤやフロントウィングからのCpTが低いエリアのマネジメントを行っている. ここではどのように渦を気流制御に用いるかという話を, 例を交えて紹介していこうと思う.
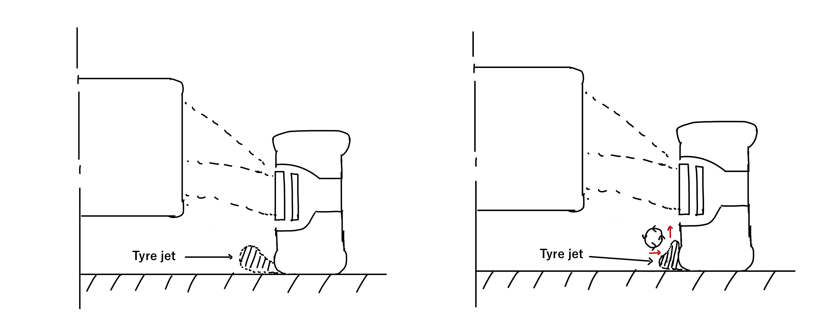
例えばフロントタイヤの接地面から生じるジェット気流の制御を考えてみよう. タイヤの接地面からのジェット気流は, 大きなCpTの損失を伴うため, 後方のデバイスのためにも, できるだけ外側に気流の領域をとどめておきたい. そこで反時計回りの渦をこのジェット気流の斜め上に配置したとして, どのように流れ場に変化があるかを考えてみる. 下図にフロントタイヤのジェット気流の様子を渦なしとありの状態で示す. 渦がない状態では, タイヤの接地面から内側の方向にジェット気流が膨らむ一方で, 渦があることで気流の領域に外側と上側成分の速度が加わり, 結果としてジェット気流をより外側にとどめておくことに成功している. F1で当時活発に使用されていたY250の渦もその機能の1つとしてタイヤ周りの気流制御が挙げられる.
もう1つの例として, 近年学生フォーミュラの一部で採用されている, フロントウィング内側のoutwash sweepという形状が後方に及ぼす影響について, 渦の観点から考えてみる. outwashのdetailによりフロントウィングのダウンフォースも大きく増大するが, 今回はフロントウィングの空力的な変化については省略する. CFDのデルタではないのでその分信憑性は薄いが, 自身の経験上流れ場がこうなるという考えのもとで以下の議論を進めていく.
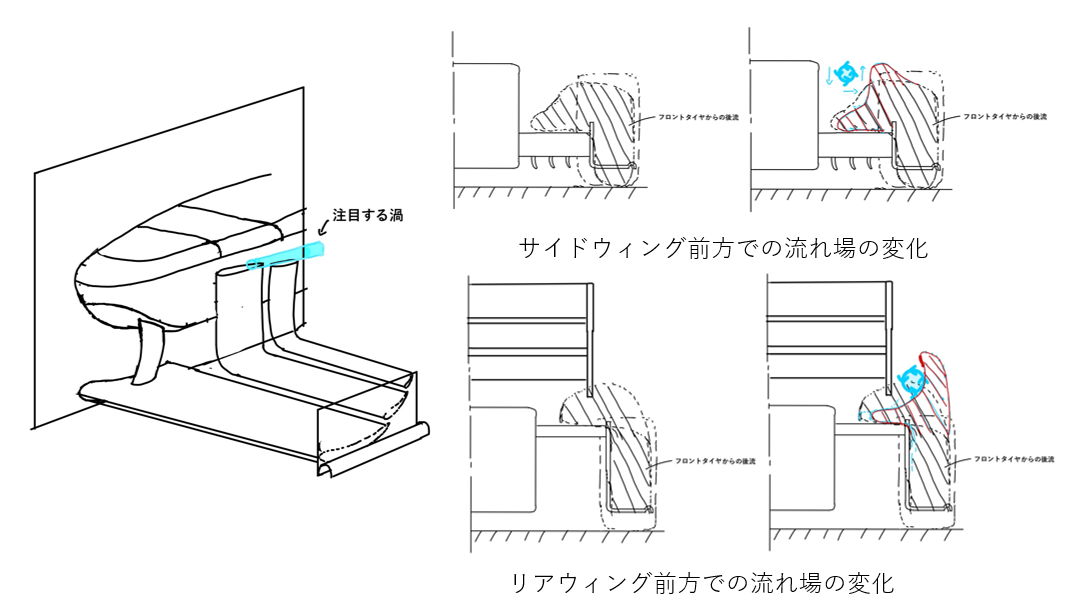
このOutwash sweepをもつフロントウィングはその翼端より反時計回りの渦(車体の反対では時計回り)を発生する. これはフロントタイヤからの後流がサイドウィングにぶつかった際に, その後流をできるだけ外側に押しやる効果があると同時に, 上方のCpTが高い領域の流れ場を下側に引きずってくることで, サイドウィングの上面の流れをきれいにすると同時に, 上面の圧力を上昇させダウンフォースを増加させる働きがある. またサイドウィングは後方にキャンバーを設けたような翼配置にすることでそのダウンフォースを最大化している配置が最もよく見られるが, それではこの後流は強い逆圧力勾配下に置かれているということになる. 後流は逆圧力勾配下ではその領域を拡大するため, 結果としてサイドウィングからリアウィングに向けて状態のよくない流れ場を送り出してしまうことになる. これもフロントウィングからの渦を使用することで, 後流の領域をできるだけリアウィングの下面から離し, かつ外側に追いやることで結果としてリアウィングのパフォーマンス増加も期待できる. この渦の効果を最も効果的に使用するには, 以下の図に示したように, 渦をリアウィングの翼端板の外側に持ってくることが1つ鍵となり, この渦が翼端板の内側にくると, 渦そのもののロスによりリアウィングのパフォーマンスが低下する.
B.3.2 複数渦を用いた気流制御
気流制御の観点からも, 1つの渦では限界がある. 上記の例に記したように, 局所的にdownwashを発生させることはできても, それと同時に上側のInwashは必ずしも望ましい気流制御とは言えない場合もある. 気流制御は多くの場合, 1つの方向の流れを強化したいという目的で使われるが, 渦の特性上, その方向の速度以外の”副作用”は付き物となってしまう. この問題を解決するには, 複数渦を用いると良い.
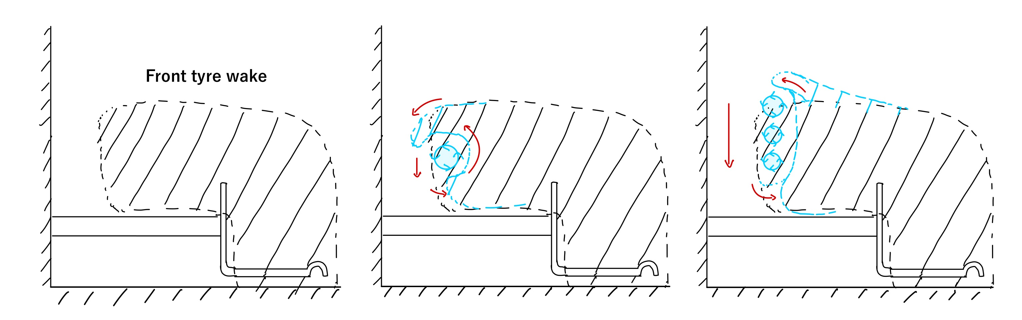
先ほどと同じく, サイドウィング前方のスライスとフロントタイヤ後流を使い1つ例を示す. 以下の図には, 渦がない状態と, 1つ渦を使って流れ場をよくしようとしている様子, そして一番右に複数の渦を用いた気流制御の様子を示している. 図より, 1つの渦では場所が悪く, 結果として上側よりCpTの低い斜線の領域が回り込もうとしている様子が分かる. これではリアウィングでのCpTを十分に確保することができず, リアウィングからのダウンフォースを失う結果となってしまう. これに対処するためには, 渦の位置をより上側にするという解決案もあるが, それは渦そのものの強さに限界が生じ, 大きな効果を期待することは難しい. そこで渦を複数連結することで, 副作用的な必要のない誘導速度は互いの回転によりキャンセルされ, 結果としてより強力な下方向の流れを実現することができる. この原理は非常に便利で, 例えば昔のバージボードのデザインではこのように渦を1つの直線状に配置する意図が見られるような翼端の配置がよくみられた. 学生フォーミュラでもフロントのタイヤウェイクの処理やサイドウィングからリアウィングに掛けてのupwashを効率よく緩和する方法として, このように複数の渦を用いる手法は非常に有効だろうと推測する.
複数渦をダウンフォースを目的として使用する場合に触れた, RANSでの渦の挙動の予測が困難であるという話はある程度はこの気流制御を目的とした複数渦システムにも少しは当てはまる. ただし気流制御を目的とする場合の多くが, 渦の強さをその限界まで高める必要性がないため, 渦の合体などの現象は比較的起こりにくく, そのためRANSと実世界での相関は, 比較的いい傾向にある. ただしタイヤウェイクそのものの挙動をRANSが正しく予測できていない場合, 例えばウェイクの形状や場所が異なると, 渦の挙動は正しくても, 渦が意図したような後流制御を行っていないという状態になる可能性は十分にあるので, 注意されたい.
B.4 渦に関する物理量
最後に渦に関する物理量を紹介する. 本章では渦を見る時にどういう物理量で渦の形状やロスの状態, 効果を評価できるのかを紹介することで, 読者がこれまでの議論をより実用的にCFDで流れ場を見る際に活用できるようになることを目的とする.
B.4.1 Cp, CpT
この2つはCFDを見る上での基本的な1つの変数である. Cpは圧力係数, CpTは全圧力係数でそれぞれ速度による影響を除くために無次元化された圧力と)全圧になる. 渦をダウンフォースとして用いたい場合, その渦が実際に低圧領域を発生させているかを確認するためにCpを用いて, 渦の形成がどれほどきれいにできているかを確認する方法としてCpTを使うと良い. 気流制御を目的とする場合は, CpTに注目し, 後流が目的通りに外側に押されているか, 綺麗なCpTの領域が増加しているかを確認するといい.
B.4.2 Helicity
Helicityは渦度と速度ベクトルの内積によって求まるスカラー場で, 渦の強さと複数渦の個々の挙動を見るのに適している. 定義を見ても分かる通り, 渦とその位置にあるCpTを両方同時に考慮したような物理量なので, 渦度とは異なり, 低圧を発生しないようなせん断流れのみの領域はHelicityではキャッチされない一方で, よりCpと関連している渦の構造を細かくキャッチしてくれる. 値の範囲としては±50万程度に設定してコンターを見ると, ダウンフォースに貢献している強い渦の挙動を観察しやすい.
B.4.3 Q criterion
最後に紹介するのはQ Criterionだ. これはiso-surfaceを出力して, レースカーの形状と重ねて表示することで, より具体的な渦の構造を理解することに適した変数だ. Q criterionはhelicityと比較するとCpとの結びつきが薄いので, 個人的にはあまりスライスでの使用はしない. 個々の渦がより正確にキャッチされるので, iso-surfaceとして表示して, 変更以前と以後でgif画像などを生成し,どのように渦の軌道に変化があったかなどを見ることをお勧めする.
B.5 最後に
このページを持って, 自分としては教科書を読んだだけでは必ずしも明らかではないレースカーの空力に関わる渦の物理を大まかにはカバーしたつもりだ. 残念ながら発言に対する根拠やリファレンスが不十分なところは多く, アカデミックな文章としては出来がよくないのは承知なものの, 空力設計の実務においてはその点はあまり重要ではないので, とりあえず書き切ることを優先して仕上げた. 多くが経験則に基づいた発言だが, 書いている内容に大きな誤りはないと思う. 学生フォーミュラなどで空力設計を担当する人には, このページの内容を参考に, 渦を用いたダウンフォース強化方法や, より高度な気流制御にチャレンジしてみてほしい. 今後は少しグランドエフェクトと渦に関連した内容を追記したい.
改訂記録
29/12/2025: 初版公開